Define-se momento (ou torque) de uma força de intensidade F aplicada num ponto P de uma barra, que pode girar livremente em torno de um ponto O (denominado pólo) ao produto da intensidade dessa força F pela distância d do ponto de aplicação da
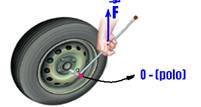
força até o ponto O. Essa distância d é denominada de braço da força.
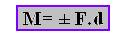
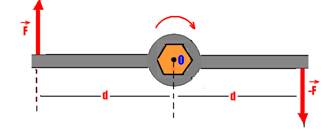
O sinal do momento da força pode ser negativo ou positivo e, por convenção, vamos adotar o sentido horário de rotação em torno de O como positivo e anti-horário como negativo.
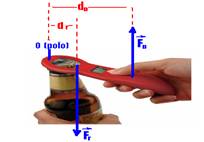
Observe nas figuras acima que o momento M é o mesmo nas situações 1 e 2, mas que a situação 2 é mais conveniente, pois exige uma força menor para girar o parafuso.
O --- pólo
d --- braço
No SI (Sistema Internacional de Unidades), o momento M é medido em newton x metro (N.m)
O que você deve saber
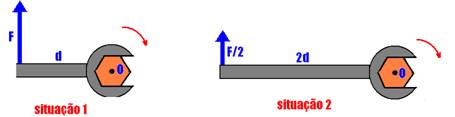
Se F for inclinada em relação à d, você pode calcular o momento da força por dois processos:
1o – Decompõe-se a força em suas componentes horizontal x e vertical y.
Fx não produz rotação e seu momento é nulo --- quem produz rotação é apenas Fy=Fsenβ --- M=Fy.d --- M=Fsenβ.d
2o – O momento também pode ser calculado como sendo o produto da distância c pela linha de ação da força, ou seja, você prolonga a força e c é a distância desse prolongamento até o pólo O.
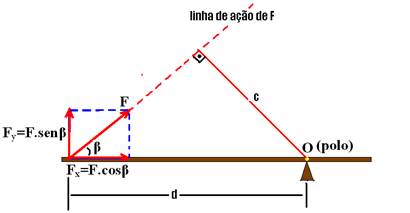
Observe que o ângulo entre c e a linha de ação da força deve ser de 90o --- senβ=c/d --- c=dsenβ --- M=F.c --- M=F.dsenβ
Em relação à um mesmo pólo, o momento da força resultante é fornecido pela soma algébrica dos momentos de cada
uma das forças, ou seja, MR=M1 + M2 + M3 + ... MM)
Binário – sistema formado por duas forças de mesma intensidade, mesma direção mas sentidos contrários separadas por uma distância d (braço do binário).
Momento do binário – corresponde à soma algébrica dos momentos das forças --- MF=+F.d --- M-F=-F.d --- Mbinário=+F.d – F.d --- Mbinário=0.
Num binário o movimento de translação é nulo (FR=0), havendo apenas movimento de rotação.
Condições de equilíbrio de um corpo extenso
São duas as condições para que um corpo extenso rígido esteja em equilíbrio:
1a – Equilíbrio de translação --- A resultante do sistema de forças deve ser nula
2a – Equilíbrio de rotação --- A soma algébrica dos momentos das forças que agem sobre o sistema, em relação à qualquer ponto (pólo O),deve ser nula.
Resolvendo o sistema composto pelas duas equações acima você chega à resolução do exercício.
O que você deve saber
Considere uma escada rígida e homogênea MN, apoiada numa parede --- para que ela não escorregue e caia, no ponto N tem que ter atrito, o que não precisa ocorrer no ponto M --- suponha que a parede é lisa, ou seja, no ponto M não existe atrito --- a figura abaixo mostra as três forças que agem sobre a escada que está em equilíbrio ---  - força
- força
- força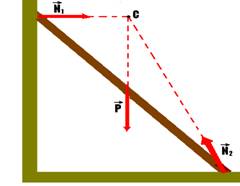
de contato com a parede ---  - força que a escada troca com o chão ---
- força que a escada troca com o chão ---  - força peso (ponto médio da escada) --- essas três forças obedecem ao teorema das três forças de enunciado: “ Se três forças agem sobre um corpo de modo a mantê-lo em equilíbrio, elas devem ser coplanares (mesmo plano) e concorrentes (seus prolongamentos devem se encontrar) num mesmo ponto (C)” --- a força que o chão troca com a escada pode ser decomposta em duas
- força peso (ponto médio da escada) --- essas três forças obedecem ao teorema das três forças de enunciado: “ Se três forças agem sobre um corpo de modo a mantê-lo em equilíbrio, elas devem ser coplanares (mesmo plano) e concorrentes (seus prolongamentos devem se encontrar) num mesmo ponto (C)” --- a força que o chão troca com a escada pode ser decomposta em duas
- força que a escada troca com o chão --- - força peso (ponto médio da escada) --- essas três forças obedecem ao teorema das três forças de enunciado: “ Se três forças agem sobre um corpo de modo a mantê-lo em equilíbrio, elas devem ser coplanares (mesmo plano) e concorrentes (seus prolongamentos devem se encontrar) num mesmo ponto (C)” --- a força que o chão troca com a escada pode ser decomposta em duas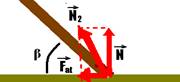
parcelas, uma força normal  de intensidade N, de direção vertical e sentido para cima que deve anular a força peso (N=P) e uma força horizontal, força de atrito
de intensidade N, de direção vertical e sentido para cima que deve anular a força peso (N=P) e uma força horizontal, força de atrito  que deve impedir que a escada escorregue --- observe que, para que a escada permaneça em equilíbrio, quanto maior for o ângulo β que a escada forma com o chão, maior deverá ser a intensidade da força de atrito .
que deve impedir que a escada escorregue --- observe que, para que a escada permaneça em equilíbrio, quanto maior for o ângulo β que a escada forma com o chão, maior deverá ser a intensidade da força de atrito .
de intensidade N, de direção vertical e sentido para cima que deve anular a força peso (N=P) e uma força horizontal, força de atrito que deve impedir que a escada escorregue --- observe que, para que a escada permaneça em equilíbrio, quanto maior for o ângulo β que a escada forma com o chão, maior deverá ser a intensidade da força de atrito .
Máquinas simples
Qualquer aparelho que utilizamos no dia a dia e que obedecem aos princípios fundamentais da mecânica são denominados máquinas simples.



 Uma das máquinas simples mais antigas utilizadas pelo homem é a alavanca que consegue multiplicar forças ou alterar a direção e sentido das mesmas.
Uma das máquinas simples mais antigas utilizadas pelo homem é a alavanca que consegue multiplicar forças ou alterar a direção e sentido das mesmas.
Toda alavanca tem que ter um ponto de apoio (O) também chamado de fulcro ou pivô e, em relação a ele são aplicadas duas forças, a força potente ( ), que é a força aplicada (esforço de um operador) e a força resistente (
), que é a força aplicada (esforço de um operador) e a força resistente ( ) que é a força transmitida (obtida, carga).
) que é a força transmitida (obtida, carga).
), que é a força aplicada (esforço de um operador) e a força resistente () que é a força transmitida (obtida, carga).O poder de multiplicação ou vantagem (η) corresponde à relação entre a intensidade da força transmitida e a intensidade da força aplicada pelo operador , ou seja,η=Fr/Fp.
Dependendo das posições relativas das posições ocupadas pela potência (F), apoio (O) e resistência (R), as alavancas classificam-se em:
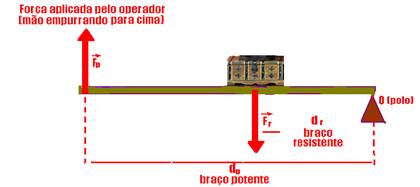
Alavanca interfixa – o apoio está entre a força potente e a força resistente
Havendo equilíbrio, a soma dos momentos das forças em relação ao apoio deve ser nula --- Fp.dp=Fr.dr --- Fr/Fp=dp/dr --- η=dp/dr --- observe que quanto maior for o braço potente, maior será a vantagem mecânica, ou seja, maior será a força transmitida.
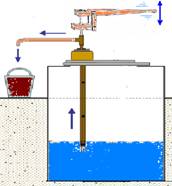
Exemplos de alavancas interfixas:

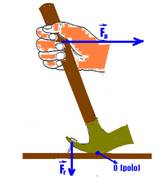

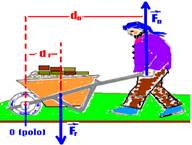
 Alavanca inter-resistente - a força transmitida (resistência) localiza-se entre o pólo e a força aplicada pelo operador
Alavanca inter-resistente - a força transmitida (resistência) localiza-se entre o pólo e a força aplicada pelo operador  .
. 
Havendo equilíbrio a soma dos momentos em relação ao pólo deve ser nula --- Fp.dp + Fr.dr=0 --- η=Fr/Fp=dp/dr
Exemplos:
Quando você está equilibrado na ponta do pé, os músculos gêmeos da barriga da perna transmitem a força potente ,
,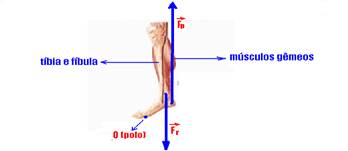
o peso do corpo transmitido pelos ossos tíbia e fíbula corresponde à força resistente e a ponta do pé corresponde ao apoio O.
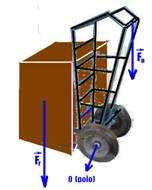
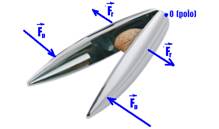
e a ponta do pé corresponde ao apoio O.Alavanca interpotente - a força aplicada pelo operador (potência) localiza-se entre o pólo e a força transmitida (resistência) .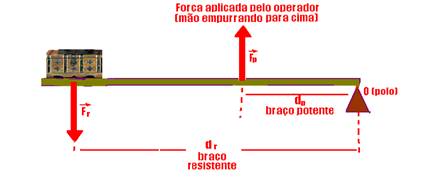
Havendo equilíbrio --- -Fr.dr + Fr.dp=0 --- η=Fr/Fp=dp/dr
:

O antebraço corresponde a uma alavanca interpotente. O bíceps é um dos músculos envolvidos no processo
de dobrar nossos braços. Esse músculo funciona num sistema de alavanca como é mostrado na figura.
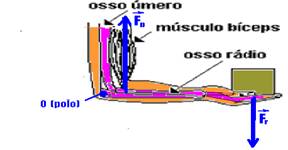
O simples ato de equilibrarmos um objeto na palma da mão, estando o braço em posição vertical e o antebraço em
posição horizontal, é o resultado de um equilíbrio das seguintes forças: a força resistente que equilibra o peso do objeto, a força potente  que o bíceps exerce sobre um dos ossos do antebraço e a força que o osso do braço exerce sobre o cotovelo, onde está o pólo.
que o bíceps exerce sobre um dos ossos do antebraço e a força que o osso do braço exerce sobre o cotovelo, onde está o pólo.
que equilibra o peso do objeto, a força potente que o bíceps exerce sobre um dos ossos do antebraço e a força que o osso do braço exerce sobre o cotovelo, onde está o pólo.




